Cooperation

Oversea Innovation Project Programme
2023-02-03
1. Purpose of the programme
Oversea Innovation Project Programme (OIPP) is a programme that offers overseas opportunities for undergraduate students in the School of Microelectronics (SME) of Tianjin University (TJU). Their majors are: Electronic Science and Technology, and Integrated Circuit Design and Integration System. The majors in general belong to Electrical and Electronics Engineering. The aim is to
l enriching students’ global perspectives and cross-cultural understanding;
l building close relationships with partner institutions in ASEAN and offering exchange opportunities for their students to TJU.
2. Organization of the programme
The programme offers SME’s role
l offers a project-based course (see Attachment 2), and a SME’s students, such as airfare.
2.2 The partner’s professor and students.
Attachment 1
Example of Program Agenda
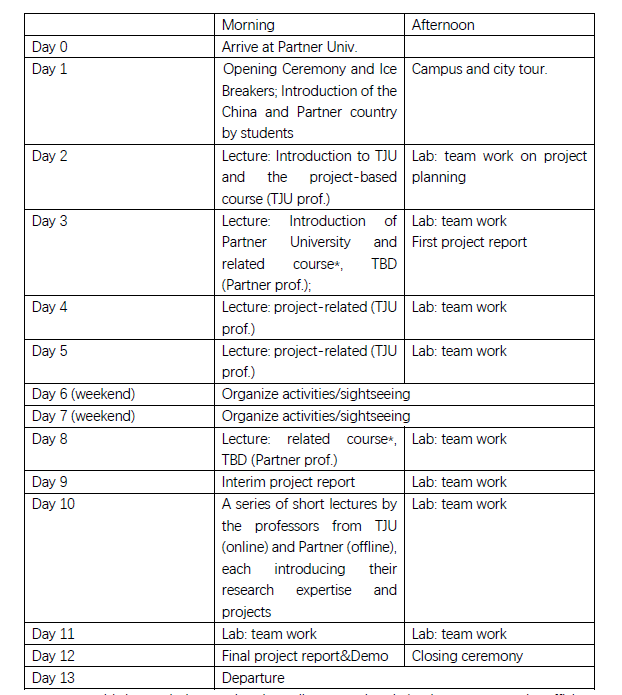
*course could be technique related or literacy related (such as teamwork, efficient communication, project management)
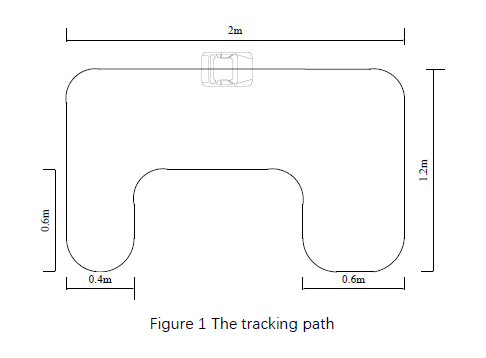
Attachment 2:Designing Automatic Tracking Robot Car
Course Description:
This course teaches physical and design concepts in automatic tracking robot car system. Students will apply electrical circuit design and programming to the car system. STM32 is selected as the type of microcontroller, infrared detection or CMOS camera is used for tracking, and infrared sensor or ultrasonic sensor is used for obstacle avoidance. The robot car system needs to be self-made.
Course requirement:
1. Basic requirements
The car can follow the black line on the white floor in a straight line to keep the car's attitude stable, and the running time from the starting point to the end point should be as short as possible. The trajectory of the small car is uniformly given.
2. Advanced requirements
It can track along the curve. One obstacle is set on the tracking path. The car has a certain obstacle avoidance function. The speed of the car can be increased as much as possible. The running time from the starting point to the end point should be as short as possible.